Nouveau
SBG Systems annonce la sortie du premier Gyroscope à base de MEMS
Un gyroscope à base de MEMS adapté aux applications sous-marines et géospatiales exigeantes.
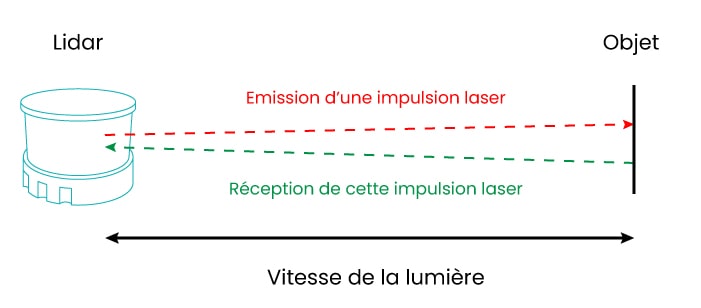
Le terme LiDAR est un acronyme anglais pour « LIght Detection And Ranging » signifiant en français « détection et estimation de la distance par la lumière ». Le Lidar est une méthode de télédétection sous forme de capteur laser consistant à mesurer le « temps de vol » (TOF ou « Time-Of-Flight ») des faisceaux lumineux. Cette technologie calcule les distances et les intensités lumineuses de manière très précises pour cartographier un environnement en 3D.
Le Lidar est un capteur envoyant rapidement des impulsions de lumière, sous forme de rayons lasers, sans risque pour l’œil humain (Class 1 Eye Safe), réfléchies sur les objets environnants (arbre, piéton, voiture, bâtiments, etc.) ou vers le sol directement. La distance exacte se calcule en mesurant le temps qu’il faut à la lumière pour se déplacer vers chaque objet et revenir vers le capteur. La vitesse de la lumière étant une constante (environ 299 792 458 m/s), le Lidar fournit ainsi une distance précise entre le capteur et un objet en temps réel.
Un Lidar à haute densité envoie des centaines de milliers d’impulsions par seconde. Toutes ces mesures sont ensuite collectées et traitées pour créer un modèle 3D de l’environnement, appelé un nuage de points.
Cette technologie capture des millions de données pour former un nuage de points afin de représenter l’environnement étudié en 3D avec des données supplémentaires telles que la position et la forme. Les Lidars couvrent des portées de quelques mètres à un kilomètre selon les modèles.
La technologie du Lidar vent est conçue pour comprendre les mouvements du vent en statique sur du long terme (généralement un an minimum) pour des applications diverses :
Bien que les deux technologies soient similaires, le radar (RAdio Detection And Ranging) utilise des ondes radio pour mesurer le temps de vol du signal réfléchi, et cela grâce à une antenne mobile ou fixe. Le principe du Lidar est différent puisqu’il utilise ce même processus mais en mesurant le parcours effectué par les faisceaux laser émis, garant d’une meilleure précision.
Contrairement au système ultrason, d’une portée trop courte, et à la caméra qui ne peut voir que le jour et par temps clair, le Lidar détecte un obstacle à plusieurs dizaines de mètres de distance (angles morts, brouillard, sac plastique, luminosité particulière au coucher du soleil, etc.), de nuit et par temps de pluie.
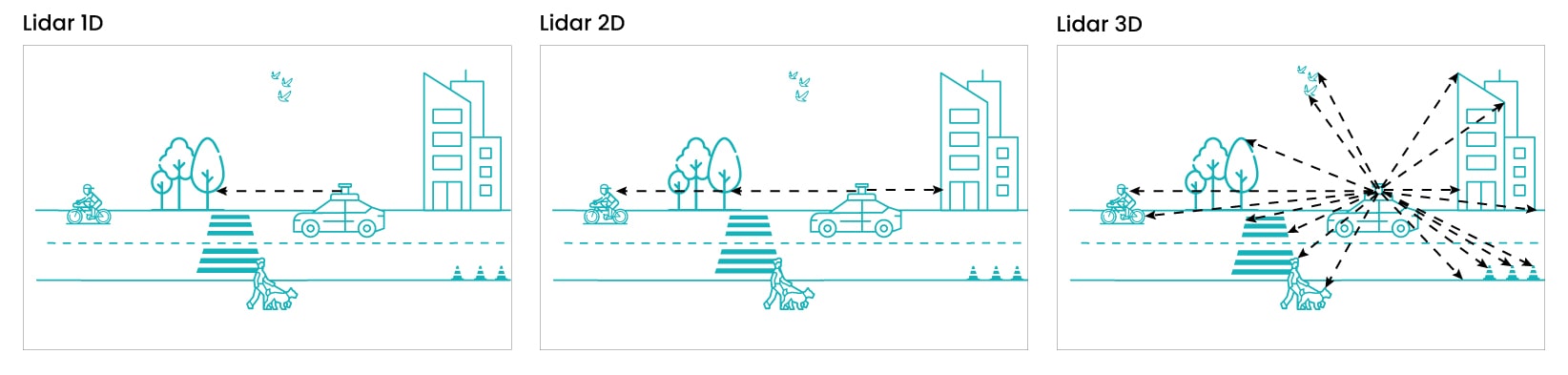
Le Lidar 1D envoie une impulsion laser unique sur un axe.
Le Lidar 2D comprend uniquement un seul faisceau laser, pour une détection sur un seul plan. Ce capteur laser est majoritairement utilisé pour des applications en sécurité (par exemple pour de la détection de mouvements sur un rayon depuis un véhicule autonome indoor). Dans le cadre de véhicule autonome indoor utilisé dans différents domaines (logistique, distribution, santé…), un capteur laser Lidar 2D à courte portée apporte une précision supplémentaire pour la sécurité des personnes (interaction entre robots et humains).
Le Lidar 3D comprend plusieurs faisceaux laser (de 16 à 128 suivant les modèles), pour une mesure simultanée sur plusieurs plans.
La fréquence laser utilisée, la puissance des diodes laser, la portée, la cadence de mesure, le nombre d’échos sont autant de paramètres influençant la précision d’un Lidar, variable de quelques millimètres à quelques centimètres. Nos gammes de capteur laser Lidar 3D (Hesai, Neptec by Lumibird, LeddarTech) fournissent des mesures de précision centimétrique.
Le cas d’usage du lidar va déterminer la longueur d’onde du laser. Dans le cadre de la création de cartographie 3D ou de la détection d’obstacles, nos Lidars fonctionnent sur des longueurs d’onde comprises entre 900 et 1550 nm.
Un Lidar à balayage mécanique est conçu pour recueillir des données sur 360° et souvent utilisé dans les services de recherche et développement pour des applications multiples (navigation autonome, road mapping, bathymétrie, etc.).
Un Lidar solid-state ne comporte aucune pièce mécanique mobile, et dispose donc d’une ouverture (FOV ou « Field Of View ») moindre par rapport au lidar mécanique. Cette absence de pièce mécanique allonge la durée de vie des Lidar, et facilite la production de ces capteurs, en réduisant les temps et les coûts de fabrication. Ces deux types de laser Lidar assurent une détection fiable dans tous types de conditions lumineuses et météorologiques, notamment du brouillard, que ce soit en statique ou en dynamique.
Le SLAM (Simultaneous Localization and Mapping) est une méthode de localisation et de cartographie en simultanée sur la base des données mesurées par Lidar. A l’aide des algorithmes du SLAM, un véhicule en mouvement équipé de systèmes GNSS et d’un Lidar peut cartographier un environnement inconnu et obtenir des nuages de points géoréférencés. Le SLAM offre également des fonctionnalités plus ou moins complexes de perception dans le nuage de points 3D, pour l’analyse de trajectoires, la mesure de vitesse, la détection d’objets mobiles ou non entourant le véhicule.
Suite à chaque impulsion laser, un Lidar peut capter plusieurs échos en retour, selon le type d’environnement dans lequel il se situe (vélo, arbre, immeuble, sol, peinture…). Chaque impulsion laser reçue en retour par le capteur laser s’est réfléchie sur les différentes surfaces, à différentes distances.
L’écho le plus fort est le premier que le Lidar va capter ; il peut s’agir d’un piéton, d’un vélo ou d’une voiture. Quant à l’écho le plus faible c’est le plus éloigné ; un arbre, un immeuble, une construction ou un sol.
Si l’on prend l’exemple d’un environnement avec de la végétation ; le Lidar installé sur le toit d’un véhicule va tout d’abord scanner les feuilles des arbres sur les trottoirs d’une route en centre-ville, c’est le premier écho.
Les points de ses faisceaux lasers ne vont pas s’arrêter là puisqu’ils vont également atteindre les immeubles situés derrière ces mêmes arbres, il s’agit du deuxième écho. La plupart des Lidar captent plusieurs échos (2 en moyenne, les Lidar Neptec by Lumibird en capte 7).
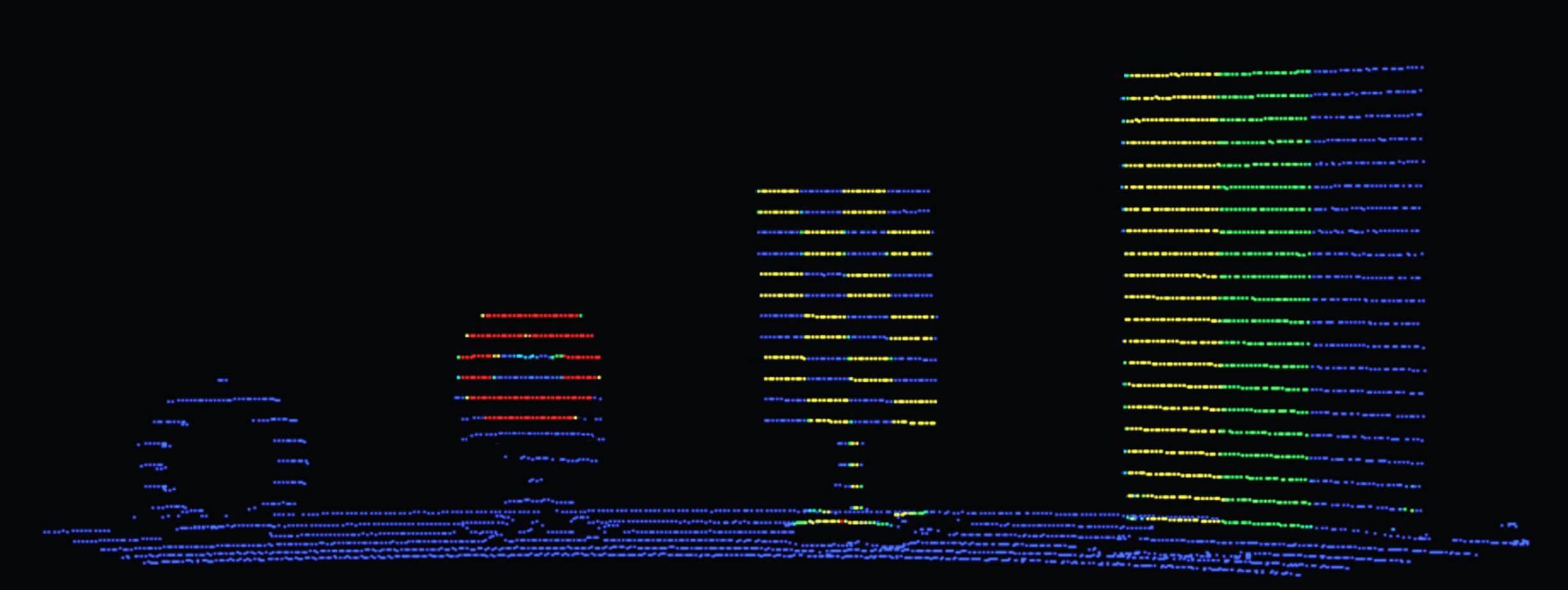
En plus de différencier plusieurs objets, la technologie du capteur Lidar rend possible l’interprétation des couleurs des surfaces réfléchissantes. Par exemple sur une route avec les marquages routiers où se retrouvent de nombreux éléments tels que les signalétiques, les panneaux publicitaires, les graffitis, etc.
Image 1 : scénario. Image 2 : données avec un Lidar Hesai XT.

Quel que soit le type d’application, un capteur laser Lidar s’utilise rarement seul. En règle générale, l’installation sur un système embarqué comprend un Lidar 3D, associé à un système GNSS et une centrale inertielle et/ou un logiciel de perception SLAM.
Qu’il soit de technologie à balayage mécanique ou solid-state, le capteur laser Lidar envoie une impulsion laser sur un objet ou sur le sol à proximité. Il va ensuite calculer une mesure entre l’impulsion et celle de retour et obtenir ainsi la distance du Lidar vers l’objet ou le sol en question.
L’ajout d’un récepteur GNSS et d’une centrale inertielle dans un système de mesure Lidar sur véhicule, drone volant ou drone marin, garantit le calcul de la position précise (X, Y, Z) de la cible détectée. Les mouvements du porteur sont compensés par la mesure de l’orientation de la centrale inertielle.
Le Lidar est utilisé dans des applications nombreuses et variées : robotique pour de la détection et reconnaissance d’obstacles, aide à la navigation de véhicule autonome, cartographie de berges, surveillance de zones sensibles et détection d’intrusion, alerte collision, navigation sans visibilité…
Voiture, bus, navette, robot agricole, robots-taxis, etc. Les moyens de transport autonomes commencent à faire leur apparition parmi les constructeurs et le Lidar se présente comme la solution idéale pour détecter les obstacles, en calculer leur distance et aider à définir une trajectoire d’évitement.
En 2021, la société américaine Nuro annonce s’être associée au géant Domino’s pour développer un véhicule autonome, équipé d’un Lidar Hesai Pandar40 sur son toit, programmé pour effectuer les livraisons de ses pizzas.
En 2018, la société française Navya expérimentait pendant un mois une navette autonome dans la ville de Nantes. Une première pour la ville qui se dotait provisoirement d’un véhicule sans chauffeur, à énergie propre et autonome (bien que dans le cadre de ce test, un agent était présent au sein de tous les véhicules) où était installé un capteur laser Lidar à l’avant de son toit.

Le mobile mapping (ou cartographie mobile) est un processus comprenant un véhicule ou un sac à dos, équipé d’un système GNSS et d’un Lidar afin de collecter des données sur 360°.
L’automatisation de tâches logistiques par des engins autonomes (AGV : Autonomous Guided Vehicle, AMR : Autonomous Mobiles Robots, transpalettes) est associé aux Lidars, pour la navigation dans les entrepôts, la détection des rayonnages, la pose ou dépose de colis et de palettes, etc.
La surveillance de sites sensibles (entrepôts, usines, réserves d’eau…) est un enjeu primordial pour de nombreuses sociétés et administrations. Associé à une application dédiée, le capteur laser Lidar est installé à des endroits stratégiques pour garantir la sécurité des lieux comme des employés, on parle alors de détection volumétrique.
Installés aux points d’entrée d’un lieu (aéroport, gare, parc…), l’intérêt du Lidar se porte sur la comptabilisation du nombre de personnes qui entrent et sortent d’une même zone. Avec une application de détection volumétrique utilisée en complément du Lidar, l’organisme définit les zones à surveiller grâce aux capteurs lasers associés à un logiciel intelligent (SLAM).
La Smart city est un nouveau concept de développement urbain avec pour objectif d’améliorer la qualité de vie des citadins et favoriser l’environnement de travail des entreprises. La capture de données par Lidar pour la connaissance précise des bâtiments et des réseaux, la navigation autonome pour l’amélioration des conditions de circulation font partie de ces axes d’amélioration.
Directement intégré sur un drone de bathymétrie, le Lidar réalise des topographies complètes autour des drones de surface lors des levés bathymétriques. L’intérêt du Lidar intégré sur un drone aquatique est de réaliser une imagerie complète d’un environnement, en synchronisant les données au-dessus et en dessous de l’eau, de façon autonome et en temps réel.
Il est alors possible de cartographier les berges au-dessus de l’eau dans un port, un pont ou les habitats côtiers. Pendant que le sondeur effectue son levé bathymétrique, le Lidar capture son nuage de points pour créer l’image 3D de ce qu’il perçoit dans l’air.
Embarqué sur un drone aérien, le capteur Lidar effectue des mesures verticales, pour la cartographie de végétations et des bâtiments, le suivi de lignes électriques, etc.
Vous avez aimé cet article ?
Partagez-le avec vos collègues ou amis
A lire ensuite
SBG Systems annonce la sortie du premier Gyroscope à base de MEMS
Un gyroscope à base de MEMS adapté aux applications sous-marines et géospatiales exigeantes.

Sonardyne dévoile la SPRINT-Nav U : précision et compacité
La nouveauté ultra-compacte Sprint-Nav U pour intégration sur UAV, ROV et USV

Retour sur la Journée Technique CADDEN 2024
Une journée riche en conférences, ateliers et célébrations !
Tous droits réservés – 2024
Vos données sont collectées et traitées pour vous envoyer notre newsletter et améliorer l’expérience utilisateur du site web. Dans ce cadre, le responsable du traitement est CADDEN. Vous disposez d’un droit d’accès, de rectification, et de suppression de vos données, ainsi que d’un droit de limitation, de portabilité ou d’opposition. Pour exercer ces droits, vous pouvez nous contacter via le formulaire de contact. Pour plus d’informations sur la façon dont nous traitons vos données personnelles, vous pouvez consulter notre Politique de confidentialité.