Zoom sur
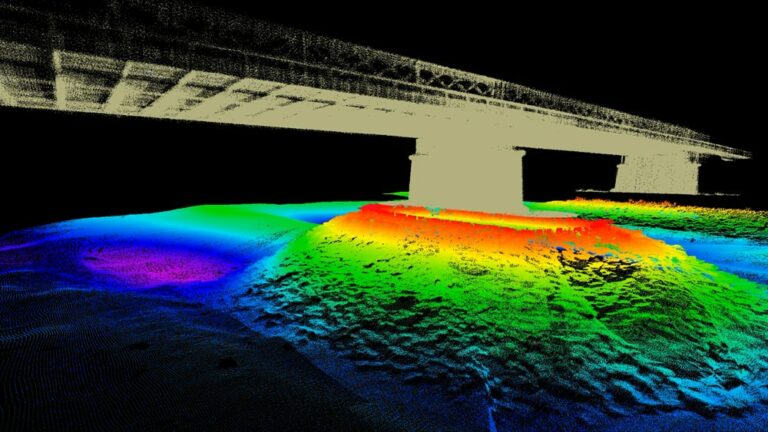
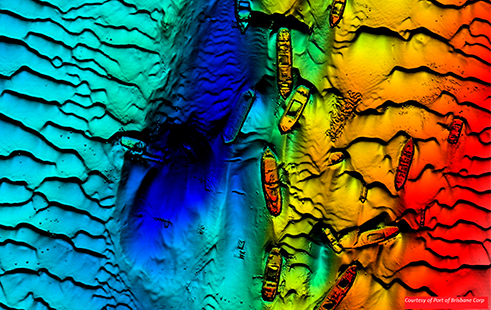
Bathymétrie : la cartographie des fonds marins
La bathymétrie consiste à définir le relief des fonds marins.






La bathymétrie consiste à définir le relief des fonds marins.
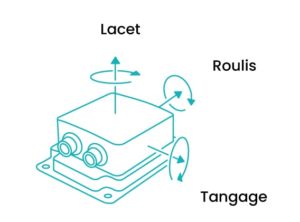
Un gyroscope à base de MEMS adapté aux applications sous-marines et géospatiales exigeantes.

La nouveauté ultra-compacte Sprint-Nav U pour intégration sur UAV, ROV et USV